
PX sērijas miniatūrs strāvas reduktors
Pārskats
J-SZ(ZYT)-PX sērijas miniatūrie līdzstrāvas piedziņas motori ir attiecīgi sastāv no SZ(ZYT) sērijas līdzstrāvas motoriem un PX tipa parastajiem precīzijas planētu reduktoriem un aprīkoti ar barošanas avotu, kas var realizēt bezpakāpju ātruma regulēšanu.Plašs regulēšanas diapazons, mazs izmērs, viegls svars, augsta efektivitāte, kompakta struktūra, liels izejas griezes moments, plaši izmantots piedziņās, kurām nepieciešams mazs ātrums, liels griezes moments un bezpakāpju ātruma regulēšana.Bezgalīgi mainīgs ātrums.
PX sērijas planetāro pārnesumu reduktoru var tieši savienot ar maiņstrāvas motoriem, pakāpju motoriem un citiem motoriem.
PX sēriju var arī tieši savienot ar gliemežpārvada reduktoru un cikloidālo šarnīra reduktoru, lai izveidotu reduktorus ar dažādu ātruma attiecību vai lielu ātruma attiecību.
Reduktoru modeļa instrukcija
Motora modelis
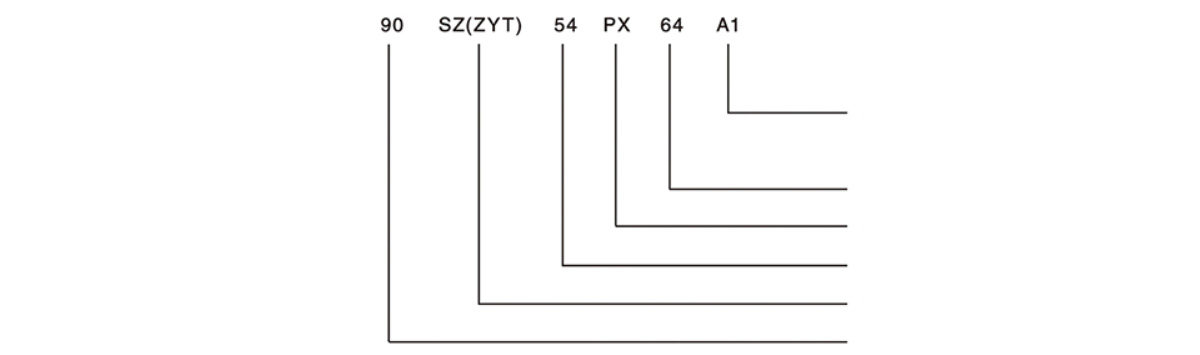
A1- uzstādīšanas forma: A1 ir pēdas uzstādīšana, A3 ir atloka uzstādīšana, B5 ir apaļa atloka uzstādīšana
64 - Samazināšanas attiecība: 1:64
PX - parasts precīzijas planētu reduktors
54 - Motora veiktspējas parametra kods
SZ(ZYT) — līdzstrāvas servomotors (pastāvīgā magnēta līdzstrāvas motors)
90 - Motora bāzes numurs: norāda ārējo diametru 90 mm
Reduktoru modelis
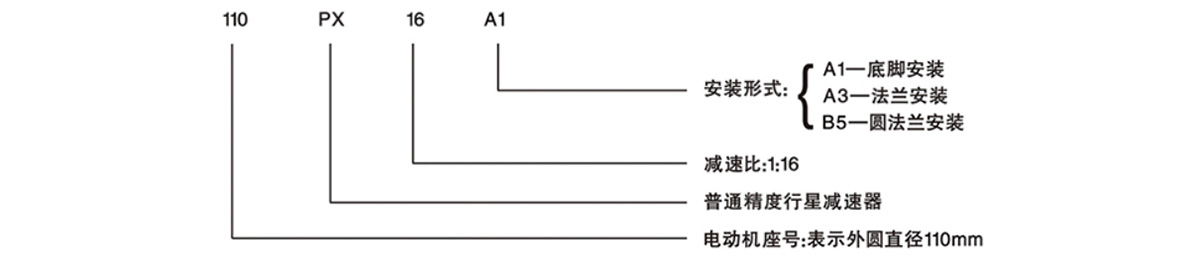
A1- uzstādīšanas forma: A1 ir pēdas uzstādīšana, A3 ir atloka uzstādīšana, B5 ir apaļa atloka uzstādīšana
16 - samazināšanas attiecība: 1:64
PX - parasts precīzijas planētu reduktors
110 - Motora bāzes numurs: norāda ārējo diametru 90 mm
Elektromotora tehniskie dati
| Ātrums (r/min) | Griezes moments (mN.m) | Modelis | Jauda | Nominālais ātrums (apgr./min) | Uzstādīt | Nominālais spriegums | Samaziniet attiecību | Piezīmes | |
| 750 | 260 | 55ZYT | 29 | 3000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187.5 | 740 | 16 | |||||||
| 47 | 21200 | 64 | |||||||
| 12 | 5900 | 256 | |||||||
| 500 | 390 | 6 | |||||||
| 83 | 1660. gads | 36 | |||||||
| 14 | 7180 | 216 | |||||||
| 750 | 450 | 70ZYT01 | 50 | 30 000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 | 380 | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 | 630 | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 | 540 | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187.5 | 1270. gads | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187.5 | 1780. gads | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 | 360 | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
PS sērijas vispārējā ātruma attiecība
1. līmenis: 4 , 6
Sekundārā: 16 , 24 , 36
3. līmenis: 64 , 96 , 144 , 216
4. līmenis: 256\384\576\864\1296
90PX sērijas nestandarta ātruma attiecība
1. līmenis: 3
2. līmenis: 9 , 12 , 18
3. līmenis: 27 , 48 , 54 , 72 , 108
4. līmenis: 81 , 162 , 192 , 288 , 324 , 432 , 648
110PX sērijas nestandarta ātruma attiecība
1. līmenis: 5
2. līmenis: 20 , 25 , 30
3. līmenis: 80 , 100 , 120 , 125 , 150 , 180
4. līmenis: 320 , 400 , 480 , 500 , 600 , 625 , 720 , 750 , 900 , 1080
Var tikt izstrādāti nestandarta reduktori, piemēram, īpaša ātruma attiecība, ātrums, uzstādīšanas izmērs utt
Atlases piemērs
Lietotājs var pareizi izvēlēties reduktora jaudu un modeli atbilstoši faktiskajai darba sistēmai un slodzes veidam, atsaucoties uz tālāk norādīto saturu.
1.Pēc slodzes griezes momenta un reduktora izejas ātruma nepieciešamo jaudu var aprēķināt pēc šādas formulas: P=T n/kh
Formulā: P- izejas jauda WT - slodzes griezes moments Nm, izvēlieties n- izejas ātrumu r/min saskaņā ar tehnisko datu lapu
K- slodzes konstante 9560 η - transmisijas efektivitāte, izvēlēta no sekojošās tabulas
Transmisijas koeficients
| Transmisijas koeficients (i) | 4(6) | 16(36) | 64(216) | 256(1296) |
| η | 0,76 | 0,72 | 0,68 | 0,65 |
2.Motora regulatoru var izvēlēties, lai realizētu reduktora bezpakāpju ātruma maiņu no O uz nominālo ātrumu.
3. Atbilstoši faktiskajai darba sistēmai un slodzes raksturam pakalpojuma koeficientu var izvēlēties, atsaucoties uz pakalpojumu koeficientu tabulu.Pēc aprēķina var noteikt nepieciešamo reduktora jaudu un atbilstoši nepieciešamajam izejas ātrumam izvēlēties reduktora modeli, atsaucoties uz tehnisko datu tabulu.
Darba indeksu lapa
| Ikdienas darba laiks | Slodzes līmenis | |||
| Vidēji stabils | Vidēji dinamiskas | Spēcīga ietekme | ||
| 12 | 1 | 1.25 | 1.75 | |
| 24 | 1.25 | 1.50 | 2 | |
Piemēram: ja slodze ir vienmērīga un stabila, nepieciešamā motora nominālā jauda ir 40W, nominālais spriegums ir 110V, izejas ātruma attiecība ir 4 un darba laiks dienā ir 12h, tad tiek izvēlēts 40W.Ja slodzei ir mērena vibrācija:
Tad: a.Skatiet pakalpojumu koeficientu tabulu, lai izvēlētos pakalpojumu sēriju kā 1,25.Nepieciešamā jauda W=40W*1,25=50W
b.Pārbaudiet papildu J70SZ54P*4 tehnisko datu lapu
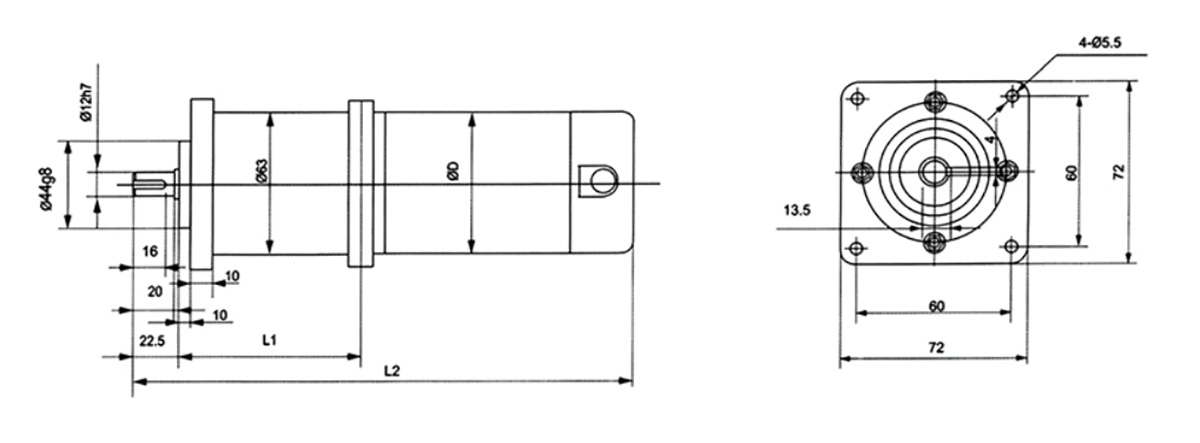
70PX priekšējais atloks
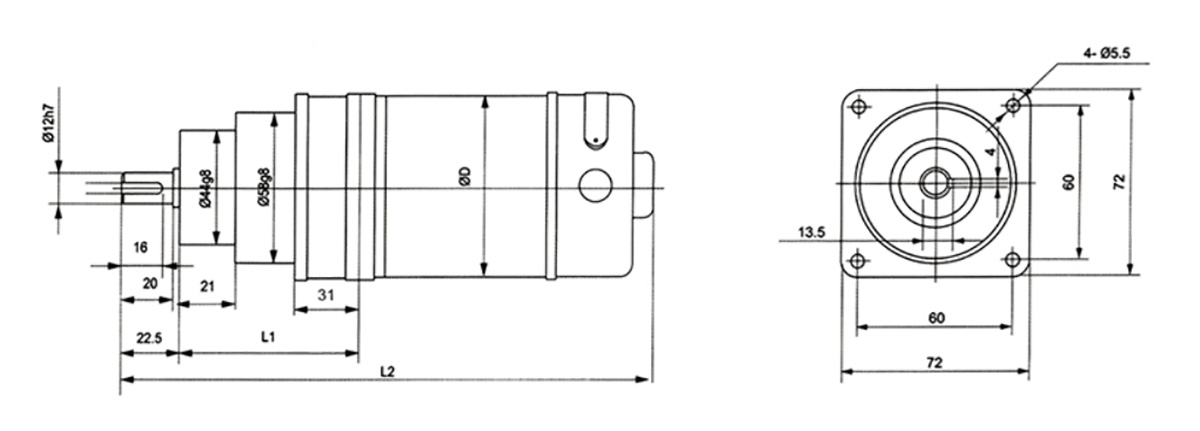
70PX aizmugurējais atloks
Produktu kategorijas
-

Līdzstrāvas samazināšanas motors 15W30W60W90W120W200W300W lēns...
-

12V24V pastāvīgā magnēta līdzstrāvas palēninājuma motors 1...
-

250W-600W 12-48V slaucīšanas mašīnas galvenās sukas motors priekš...
-

96V7.5KW bezsuku līdzstrāvas pastāvīgā magnēta motors ne...
-

Planetārais līdzstrāvas palēninājuma motors 42XA775 liels t...
-

Xinda rv40 līdzstrāvas samazināšanas turbīnas motors 12 / 24v2...





